This solution also offers a further advantage, since the continuous mowing ensures that the grass is always young and soft, and as it is cut in very small pieces it is due to decomposing itself in a short time, thus serving as fertilization for the lawn. You shouldn’t expect the grass that has been cut to be gathered: on the contrary, it will deposit itself among the grass blades that have just been cut.
For this kind of usage, less power is needed, and can be easily managed with a battery powered system. The weak power in play convinced us to choose a traction and a cutting engine with reduced power. Probably, they might not completely suit the needs of our readers, who may anyway pick up the engines and the structure they prefer, depending on their budget and personal exigencies. To define the cutting zones in a lawn, the underground wiring system proves to be at the same time simple, accurate and reliable. It is also the best system to define the work area of the robot.
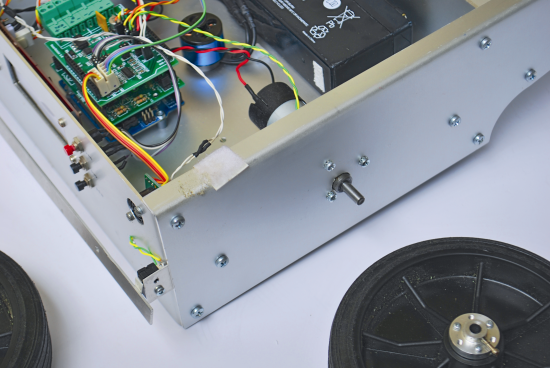
Everything is based on the usage of a simple electric wire, laid on the ground or a bit under it, and connected to a control unit powering the wire itself with an alternating electric signal at about 10 V and a frequency of 34KHz. In the lower part of the chassis of the robot two small reels are installed, one on the right side, the other on the left side, both referring to an electric circuit formed by a capacitor in parallel. The circuit formed by the parallel inductance and the capacitor is called parallel resonating circuit and is calculated so that the tension at its ends, induced by the external magnetic field, is at a maximum when the magnetic field varies with a frequency of 34KHz.